نوآوری دیزنی؛ رباتهای انساننما حالا نرم و خوشاستایل روی زمین میافتند [تماشا کنید]
دیزنی به راهکاری جدید دست یافته که شیوه میتواند سقوط رباتهای دوپا را کاملاً تغییر دهد. گروه مهندسی این شرکت سامانهای توسعه داده که به محض برهمخوردن تعادل ربات وارد عمل میشود و نحوه سقوط او را بهگونهای مدیریت میکند که هم شدت ضربه به حداقل برسد و هم حرکت نهایی حالتی نرم و کنترلشده داشته باشد.
اهمیت این فناوری زمانی بیشتر آشکار میشود که بدانیم رباتهای دوپا با وجود ساختار مکانیکی پیشرفته، در برابر برخوردهای ناگهانی یا لغزشهای کوچک نیز معمولاً مقاومت کافی ندارند و زمینخوردن آنها میتواند خسارت جدی به بخشهای ظریف و گرانقیمت مانند حسگرها و دوربینها وارد کند.
نوآوری جدید دیزنی درباره نحوه سقوط رباتهای دوپا
براساس گزارشها ، تیم تحقیقاتی دیزنی در زوریخ برای رفع این مشکل سیستمی جدید ارائه کرده که دقیقا در لحظه سقوط فعال میشود و رفتار ربات را بهگونهای هدایت میکند که ضربه نهایی به کمترین مقدار برسد. روشهای پیشین نه توان کنترل کافی داشتند و نه میتوانستند شدت برخورد را به شکل مؤثر کاهش دهند. در برخی تکنیکها عملگرهای ربات در اثر سقوط قفل میشدند و ربات با بدنی خشک به زمین میخورد و در روشهای دیگر، ربات کاملاً شل میشد و سقوطی بینظم پیدا میکرد. حتی الگوهای ازپیشبرنامهریزیشده هم فقط در سقوطهای ساده و آهسته کارایی داشتند.
محققان در مقالهای در arXiv توضیح دادهاند که چگونه با بهرهگیری از یادگیری تقویتی، رباتها را طوری آموزش دادند که هنگام سقوط حرکتی نرم و کنترلشده داشته باشند. برای این منظور، هزاران ربات مجازی در یک شبیهساز رایانهای از موقعیتها و زوایای مختلف به زمین پرتاب شدند. هر بار که ربات مجازی توانست شدت برخورد را کاهش دهد و در یکی از حالتهای تعیینشده فرود آید، پاداش دریافت میکرد. تکرار مداوم این فرایند و بازخورد لحظهای باعث شد رباتها الگوی جامع و قابلانتقالی برای مدیریت ایمن سقوط ایجاد کنند.
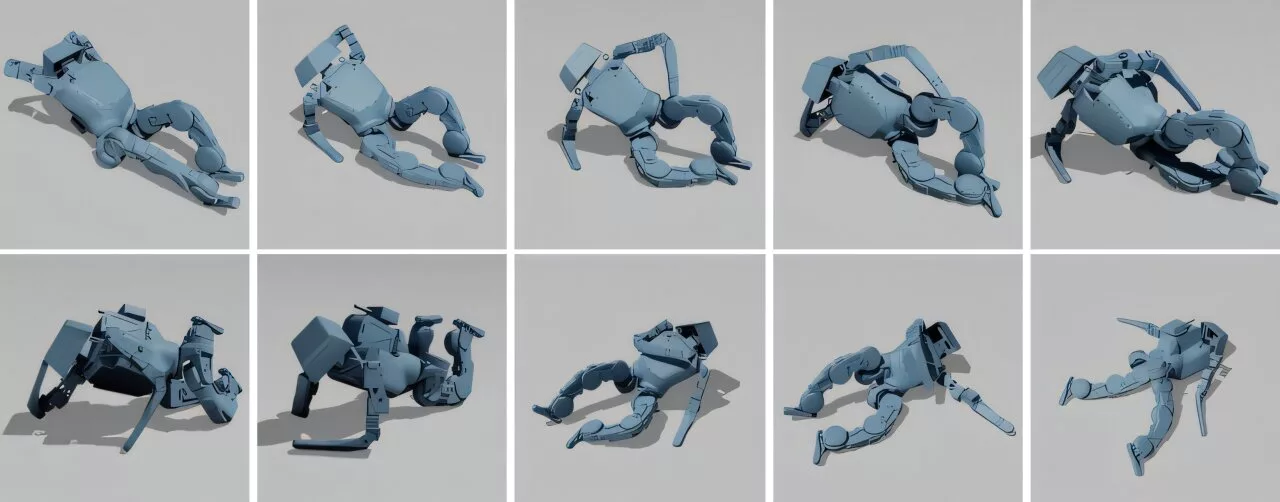
در مرحله بعدی، این الگوریتم بر روی یک ربات دوپای واقعی اعمال شد. بهعلاوه، تیم پژوهشی برای نقطه پایان هر سقوط، 10 استایل هنری از پیشطراحیشده تعیین کرد و ربات را با ضربه یا تحریک عمدی از زوایای تصادفی به سقوط واداشت. با تکرار مکرر این آزمایشها، ربات بدون هیچ آسیب قابلتوجهی به زمین میافتاد و هر بار حرکتی کنترلشده و حسابشده از خود نشان داد. پژوهشگران این روش را نخستین رویکرد عمومی برای سقوط کنترلشده رباتهای دوپا در دنیای واقعی میدانند.
گام بعدی دیزنی توسعه و آزمایش این سیستم روی انواع رباتها، از جمله مدلهای چهارپا، است تا مشخص شود آیا این روش قابلیت تعمیم دارد یا خیر. علاوهبراین، هدف تیم این است که ربات بتواند از پیش، سقوط را پیشبینی کند و در آینده مکانیزمی طراحی شود که پس از برخورد با زمین، ربات بتواند دوباره بهصورت نرم و کنترلشده روی پای خود بایستد.